

Rol del fisioterapeuta en el entrenamiento con exoesqueleto en pacientes con lesión medular: experiencia piloto hospitalaria
The role of the physiotherapist in exoskeleton-assisted training in patients with spinal cord injury: a hospital-based pilot experience
Introducción
La lesión medular (LM) constituye una de las condiciones neurológicas con mayor impacto funcional, afectando significativamente la movilidad, la autonomía y la participación en actividades de la vida diaria. La pérdida o limitación prolongada de la bipedestación y de la marcha se asocia a múltiples consecuencias secundarias, como el deterioro de la función cardiovascular, la disminución de la masa muscular, las alteraciones respiratorias y las complicaciones óseas, lo que refuerza la necesidad de incorporar intervenciones que favorezcan la verticalización y el movimiento asistido dentro de los programas de rehabilitación(1).
Tradicionalmente, el entrenamiento de la marcha en personas con LM se ha estructurado a partir de diferentes estrategias terapéuticas, como el uso de ortesis largas del miembro inferior (incluidos los bitutores o las ortesis de tipo knee-ankle-foot orthoses –KAFO–), el acompañamiento físico del fisioterapeuta durante la bipedestación y la marcha, y la utilización de dispositivos robóticos estacionarios, como los sistemas de marcha suspendida en cinta rodante(2,3). Estas intervenciones continúan siendo fundamentales dentro del proceso rehabilitador, especialmente en fases iniciales, cuando el paciente no presenta un control suficiente del tronco o no reúne las condiciones necesarias para un entrenamiento en bipedestación más activo. No obstante, desde la práctica clínica estas estrategias pueden presentar limitaciones en determinados momentos del proceso. En el caso de los bitutores, el esfuerzo requerido por el propio paciente para mantener la bipedestación y avanzar el paso puede condicionar la duración y la intensidad del entrenamiento, sobre todo al inicio(2). Por su parte, el acompañamiento físico continuo por parte del fisioterapeuta durante las transferencias y cambios posturales de los pacientes supone una carga física relevante, lo que puede limitar la sostenibilidad del tratamiento en sesiones prolongadas(2).
En este contexto, el uso del exoesqueleto se plantea como una herramienta complementaria, que se incorpora cuando el paciente cumple unos requisitos mínimos y sin sustituir las terapias convencionales, sino integrándose de forma progresiva dentro del abordaje rehabilitador global. Estos dispositivos permiten facilitar la bipedestación y la ejecución de un patrón de marcha asistido, reduciendo la demanda de fuerza que recae tanto sobre el paciente como sobre el terapeuta en determinadas fases del proceso(3). La literatura describe su uso como seguro y bien tolerado cuando se aplica en contextos clínicos controlados y bajo supervisión especializada, destacando que los resultados dependen en gran medida del criterio clínico con el que se indica, se dosifica y se progresa la intervención(4,5,6).
El exoesqueleto ABLE Exoskeleton® (ABLE Human Motion S.L., Barcelona, España) ha sido objeto de investigaciones recientes que evidencian su seguridad, viabilidad y buena aceptación en entornos clínicos(7,8,9,10). No obstante, más allá de las características del dispositivo, existe todavía escasa literatura que describa con detalle el papel del fisioterapeuta en la ejecución diaria del entrenamiento con exoesqueleto dentro de un entorno hospitalario(11).
El objetivo del presente estudio piloto es describir una experiencia hospitalaria real de entrenamiento de la marcha asistida con exoesqueleto en pacientes con LM, destacando el papel del fisioterapeuta a lo largo de todo el proceso terapéutico.
Material y métodos
Diseño del estudio y participantes
Se presenta un reporte descriptivo de una experiencia clínica realizado en un entorno hospitalario con 2 pacientes con LM, uno en fase crónica y otro en fase subaguda, ambos clínicamente estabilizados. Las características clínicas de los participantes se presentan en la Tabla 1. La valoración clínica inicial, el diagnóstico funcional y la indicación del entrenamiento con exoesqueleto se llevaron a cabo en el Servicio de Rehabilitación del hospital, en un contexto interdisciplinario. La inclusión de los pacientes en el programa fue establecida por el médico rehabilitador, siendo el fisioterapeuta responsable del desarrollo y la aplicación del entrenamiento.
retla.09117.fs2605010-tabla1.png
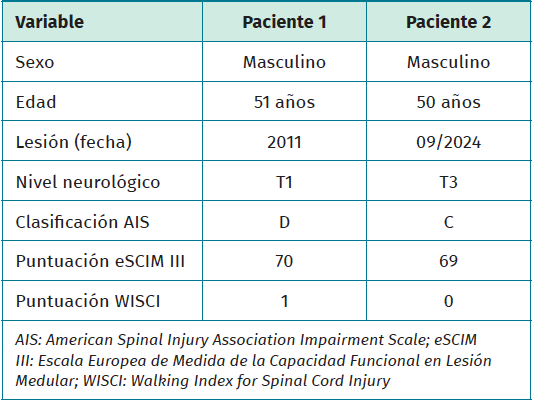
Tabla 1. Características demográficas y clínicas basales de los participantes
Se incluyeron 2 pacientes con LM estable e indicación clínica de entrenamiento con exoesqueleto que cumplieron los criterios de inclusión y exclusión que se describen en la Tabla 2.
retla.09117.fs2605010-tabla2.png

Tabla 2. Criterios de inclusión y exclusión aplicados en la selección de participantes
Equipo terapéutico y capacitación
La intervención fue desarrollada por 2 fisioterapeutas con experiencia clínica en el abordaje de pacientes con LM. Ambos profesionales realizaron previamente una capacitación específica para el manejo seguro del exoesqueleto ABLE Exoskeleton® utilizado en el estudio, que incluyó formación en su colocación, ajuste, asistencia manual, progresión del entrenamiento y actuación ante eventos adversos. Dada la complejidad técnica de este tipo de dispositivos, dicha capacitación se considera necesaria para la aplicación clínica de cualquier exoesqueleto robótico, independientemente de la marca comercial, y constituye un requisito fundamental para garantizar la seguridad del paciente.
Educación inicial del paciente
Antes de iniciar el entrenamiento, se realizó una sesión de educación terapéutica con cada paciente. En esta fase se explicaron los objetivos generales del programa, las normas básicas de seguridad y las nociones esenciales relacionadas con la bipedestación, el equilibrio y el control del centro de gravedad. Esta intervención inicial tuvo como finalidad facilitar la comprensión del proceso, reducir la incertidumbre del paciente y prevenir errores o usos inadecuados durante las primeras sesiones.
Programa de entrenamiento
Los pacientes participaron en un programa estructurado de 12 sesiones, con una frecuencia de 3 sesiones semanales. Cada sesión tuvo una duración aproximada de entre 60 y 90 minutos, de los cuales alrededor de 30 minutos se destinaron al entrenamiento dinámico en bipedestación y marcha asistida (Figura 1).
retla.09117.fs2605010-figura1.png
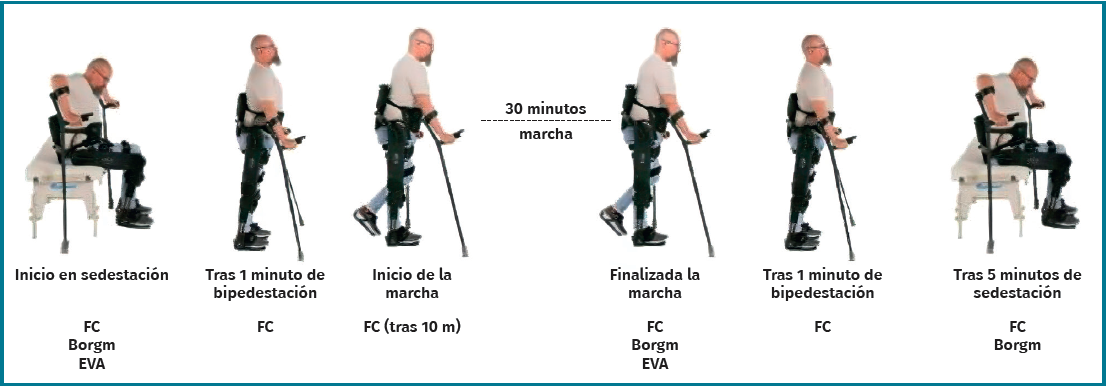
Figura 1. Secuencia del protocolo de entrenamiento y registro de las variables durante una sesión de marcha asistida con exoesqueleto. Se muestra la transición desde la sedestación inicial a la bipedestación, el inicio y la finalización de la marcha asistida (30 minutos) y el retorno a la sedestación. En cada fase se registraron variables clínicas y fisiológicas, incluyendo la frecuencia cardiaca (FC) en diferentes momentos de la sesión, entre ellos tras los primeros 10 metros de marcha asistida (FC tras 10 m), escala de esfuerzo percibido de Borg modificada (Borgm) y escala visual analógica de dolor (EVA). Imagen cedida por ABLE Human Motion S.L., Barcelona, España.
El programa se organizó en 2 fases: una fase de familiarización y una fase de progresión.
Fase de familiarización
La fase de familiarización tuvo como objetivo principal garantizar la seguridad del paciente y favorecer la adaptación inicial al entrenamiento en bipedestación. Previamente a la colocación del exoesqueleto, se confirmó que los pacientes habían tolerado la bipedestación en el último año y que no presentaban antecedentes recientes de fracturas u otras contraindicaciones médicas.
Esta fase incluyó la toma inicial de medidas antropométricas, la transferencia del paciente desde la silla de ruedas al dispositivo, realizada de forma asistida y supervisada por el fisioterapeuta, y el ajuste global del exoesqueleto en sedestación (Figura 2), asegurando una alineación articular adecuada y una configuración inicial segura de los parámetros de asistencia.
retla.09117.fs2605010-figura2.png

Figura 2. Ajuste global del exoesqueleto en sedestación realizado por el fisioterapeuta, asegurando la correcta alineación articular y el posicionamiento adecuado de los segmentos del dispositivo antes del inicio del entrenamiento en bipedestación y marcha asistida.
Durante las primeras sesiones se trabajó la bipedestación estática, el reconocimiento del centro de gravedad y los desplazamientos de peso, con apoyo físico y verbal continuo por parte del fisioterapeuta. Se empleó como ayuda externa un caminador específico, que se mantuvo como soporte por defecto durante todo el proceso, salvo en uno de los pacientes, que alcanzó patrones de marcha más complejos. El objetivo de esta fase fue que el paciente adquiriera conciencia corporal y comprendiera cómo iniciar y finalizar el movimiento de forma controlada, pudiendo realizar balanceos e incluso algunos pasos muy guiados (Figura 3).
retla.09117.fs2605010-figura3.png

Figura 3. Secuencia inicial del entrenamiento con exoesqueleto. A: preparación del paciente para el paso de sedestación a bipedestación con asistencia del fisioterapeuta, asegurando la estabilidad y la correcta activación del dispositivo; B: entrenamiento de la bipedestación estática, centrado en el control postural, el ajuste del centro de gravedad y la adaptación inicial a la carga en posición erguida.
Asimismo, se utilizó biofeedback visual que mostraba en tiempo real la posición del centro de gravedad, con el fin de facilitar el aprendizaje postural. La frecuencia cardiaca fue monitorizada en cada cambio postural para valorar la respuesta fisiológica inicial a la bipedestación y prevenir posibles descompensaciones.
Fase de progresión
Una vez alcanzada una adaptación básica, se inició la fase de progresión del entrenamiento. En esta etapa, el fisioterapeuta ajustó de manera individualizada los parámetros del dispositivo en función de la evolución clínica y la tolerancia del paciente, incrementando progresivamente el tiempo de marcha, el número de pasos y la participación activa (Figura 4).
retla.09117.fs2605010-figura4.png

Figura 4. Entrenamiento de la marcha asistida con exoesqueleto bajo supervisión del fisioterapeuta. A: marcha asistida con apoyo manual del fisioterapeuta, orientada al control postural, la alineación corporal y el guiado del patrón de marcha; B: visión frontal del paciente durante la marcha asistida con caminador, con el fisioterapeuta situado posteriormente para supervisar la seguridad, el control del movimiento y la progresión del entrenamiento.
La progresión del entrenamiento se adaptó al tipo y nivel de LM. En este estudio, ambos participantes presentaban lesiones incompletas, lo que facilitó una reducción progresiva de la asistencia del dispositivo conforme mejoraba el control motor y postural durante las sesiones (Figura 5).
retla.09117.fs2605010-figura5.png

Figura 5. Progresión del entrenamiento de la marcha asistida con exoesqueleto en un paciente con lesión medular incompleta. Se observa la marcha con menor nivel de asistencia del dispositivo, reflejando una mayor participación activa del paciente y un mejor control motor y postural, bajo supervisión del fisioterapeuta y con apoyo de ayudas técnicas.
En aquellos casos en los que el paciente muestre estabilidad suficiente, buen manejo del dispositivo y un nivel de lesión compatible, es posible introducir patrones de marcha más complejos. En este estudio, el paciente en fase subaguda alcanzó estas condiciones y pudo entrenar un patrón de marcha en 4 puntos con muletas bajo supervisión constante (Figura 6).
retla.09117.fs2605010-figura6.png

Figura 6. Entrenamiento de un patrón de marcha en 4 puntos con muletas en un paciente con lesión medular incompleta en fase subaguda. Se observa la ejecución de la marcha asistida con exoesqueleto, con participación activa del paciente y supervisión constante del fisioterapeuta, tras alcanzar un adecuado control postural y manejo del dispositivo.
Registro de variables y criterios de seguridad
Durante cada sesión se registraron parámetros clínicos y fisiológicos, incluyendo el dolor mediante la escala visual analógica (EVA), la fatiga percibida mediante la escala de Borg modificada (Borgm) y la frecuencia cardiaca mediante un sensor óptico de brazo (Polar® OH1+). Asimismo, se recogieron datos objetivos proporcionados por el exoesqueleto, como el número de pasos, la cadencia y el tiempo activo de marcha.
Se establecieron criterios explícitos de suspensión del entrenamiento, como la aparición de hipotensión ortostática sintomática, dolor relevante, fatiga excesiva, pérdida de control postural, lesiones cutáneas o solicitud expresa del paciente. En función de la situación clínica, el fisioterapeuta podía realizar una sedestación asistida de forma urgente o, en caso necesario, un descenso controlado al suelo con las extremidades bloqueadas en extensión, garantizando la seguridad del paciente en todo momento.
Resultados
Ambos pacientes completaron el programa de 12 sesiones sin que se registraran caídas, eventos adversos relevantes ni lesiones cutáneas asociadas al uso del exoesqueleto. No fue necesario suspender ninguna sesión por motivos de seguridad, aunque en determinadas ocasiones se realizaron pausas breves o ajustes del entrenamiento en función de la respuesta clínica observada durante la sesión.
Resultados objetivos
Como se muestra en la Tabla 3, durante la fase de progresión se observó un aumento del tiempo efectivo de marcha, del número de pasos realizados por sesión y de la cadencia en ambos pacientes, en relación con las primeras sesiones del programa. Asimismo, la frecuencia cardiaca se mantuvo dentro de rangos clínicamente seguros a lo largo de todas las sesiones.
retla.09117.fs2605010-tabla3.png
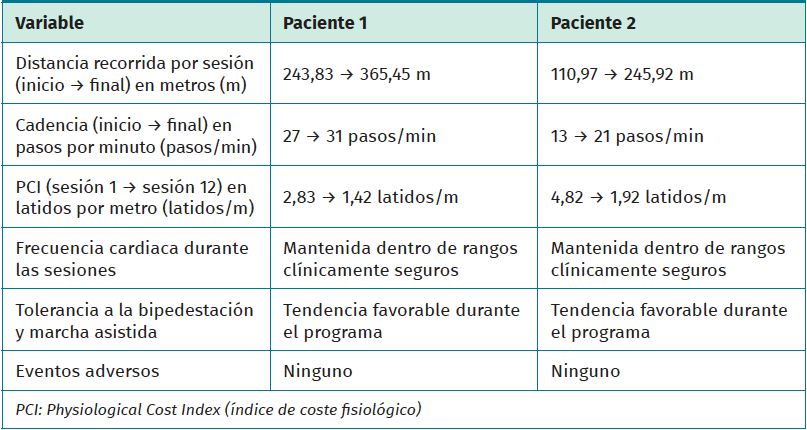
Tabla 3. Evolución descriptiva de las variables de la marcha y fisiológicas durante el programa de entrenamiento con exoesqueleto
En relación con la respuesta fisiológica, se observó una tendencia a una mejor tolerancia cardiovascular a la bipedestación y a la marcha asistida a lo largo del programa. Del mismo modo, se identificó una tendencia a la mejoría del Physiological Cost Index (PCI), indicador indirecto del coste energético de la marcha. Estos hallazgos deben interpretarse con cautela debido al reducido tamaño muestral y al carácter descriptivo del estudio.
Observaciones desde la perspectiva del fisioterapeuta
Desde la práctica clínica, el entrenamiento con exoesqueleto implica una elevada complejidad técnica y requiere formación específica para su correcta aplicación. La intervención conllevó supervisión continua, ajustes frecuentes de los parámetros del dispositivo y la toma de decisiones constante por parte del fisioterapeuta en función de la respuesta clínica del paciente.
El uso del exoesqueleto facilitó la estructuración de las sesiones de marcha asistida, permitiendo un control más preciso del patrón de movimiento, la postura y la dosificación del esfuerzo. Asimismo, desde la observación clínica, el soporte mecánico del dispositivo se asoció a una menor necesidad de asistencia manual directa y a una redistribución del esfuerzo durante la sesión en comparación con modalidades tradicionales como el uso de ortesis largas o el acompañamiento físico continuo. Esta apreciación debe interpretarse como una observación clínica y no como una medida objetiva cuantificada.
Percepción de los pacientes
Ambos pacientes toleraron adecuadamente el entrenamiento y refirieron una sensación de mayor estabilidad y seguridad durante la bipedestación y la marcha asistida. De forma subjetiva, también describieron una mayor implicación en su proceso rehabilitador.
Adicionalmente, los pacientes señalaron beneficios percibidos en su vida diaria, como una mejor calidad del descanso nocturno y una mayor tolerancia al tiempo en bipedestación en el entorno domiciliario. Estas percepciones se recogen como información subjetiva y deben interpretarse dentro del contexto del carácter descriptivo del estudio.
Discusión
Los resultados de este estudio piloto coinciden con la literatura previa que describe el entrenamiento con exoesqueletos como una intervención segura y bien tolerada en pacientes con LM clínicamente estabilizada cuando se aplica en entornos controlados y bajo supervisión especializada, destacando especialmente el papel del fisioterapeuta como figura clave en la planificación, la ejecución y la progresión del tratamiento(4,5,6,11). Más allá de las características técnicas del dispositivo, la experiencia clínica descrita pone de manifiesto que la eficacia y la seguridad del entrenamiento dependen en gran medida del razonamiento clínico, la supervisión continua y la capacidad del fisioterapeuta para adaptar la intervención a la evolución funcional del paciente(11).
Desde este punto de vista, el entrenamiento con exoesqueleto no puede entenderse como una intervención automatizada, sino como un proceso terapéutico complejo que requiere una participación activa del fisioterapeuta en todas sus fases(7,9). La preparación del paciente, la educación terapéutica inicial, el ajuste individualizado del dispositivo y la dosificación progresiva del esfuerzo constituyen elementos fundamentales del proceso, en línea con lo descrito en la literatura sobre la implementación clínica de exoesqueletos en rehabilitación neurológica(7,8,9,10). Diversos estudios subrayan que la correcta selección del paciente, junto con una supervisión especializada, son factores determinantes para garantizar una aplicación segura y eficaz de este tipo de tecnología(4,5,6).
La experiencia recogida en este estudio refuerza la idea de que el exoesqueleto actúa como una herramienta facilitadora que permite al fisioterapeuta centrar la intervención en aspectos clínicos clave, como el control postural, la calidad del movimiento y la progresión funcional, reduciendo la carga física asociada a la asistencia manual continua(3,4,6). Este aspecto resulta especialmente relevante en el contexto hospitalario, donde la intensidad y la duración de las sesiones pueden verse limitadas por la exigencia física que suponen determinadas modalidades tradicionales de entrenamiento de la marcha(2). En este sentido, el exoesqueleto no sustituye el papel del fisioterapeuta, sino que amplía sus posibilidades de intervención y optimiza la organización de la sesión terapéutica(3).
En comparación con otras estrategias empleadas habitualmente en la rehabilitación de la LM, como el uso de bitutores o los sistemas robóticos estacionarios, el exoesqueleto ofrece un soporte mecánico que facilita la bipedestación y la práctica repetida de la marcha asistida con una menor demanda de esfuerzo desde fases tempranas(2,3,12). No obstante, su utilización no debe considerarse excluyente ni sustitutiva de las terapias convencionales. Tal como señalan estudios previos, estas continúan siendo imprescindibles, especialmente en fases iniciales del proceso rehabilitador o en pacientes con un control de tronco insuficiente, constituyendo la base sobre la que posteriormente puede incorporarse el entrenamiento con exoesqueleto cuando se cumplen los requisitos clínicos necesarios(2).
La progresión observada en los parámetros de marcha, junto con la estabilidad clínica mantenida durante el programa, refuerza la viabilidad de su integración en el contexto hospitalario, tal como ha sido descrito en estudios previos sobre la aplicación clínica de exoesqueletos en programas de rehabilitación(4,5,6,7). La progresión registrada en el tiempo efectivo de marcha, el número de pasos y la cadencia, junto con la estabilidad clínica mantenida durante el programa, refuerzan la viabilidad de integrar el entrenamiento con exoesqueleto dentro de los programas de rehabilitación hospitalaria(5,6,7). Estos hallazgos coinciden con investigaciones que señalan que, más allá de los cambios funcionales inmediatos, el valor del exoesqueleto reside en su capacidad para facilitar la bipedestación y la práctica repetida de la marcha en pacientes que, de otro modo, tendrían un acceso más limitado a este tipo de entrenamiento(4,6).
Asimismo, las percepciones subjetivas reportadas por los pacientes, como una mayor sensación de estabilidad, seguridad y una mayor implicación en su proceso rehabilitador, han sido descritas en estudios previos como factores relevantes para la adherencia al tratamiento y la motivación durante programas de rehabilitación intensiva(8,11). Estos aspectos, aunque difíciles de cuantificar, adquieren especial importancia en el abordaje de la LM, donde la participación activa del paciente constituye un elemento clave del proceso terapéutico.
Este estudio presenta limitaciones inherentes a su diseño piloto, entre las que destacan el reducido número de participantes y la duración limitada del programa de intervención, lo que impide extraer conclusiones generalizables. No obstante, la principal aportación de este trabajo reside en la descripción detallada de una experiencia clínica real, centrada en el papel del fisioterapeuta dentro del entrenamiento con exoesqueleto en un entorno hospitalario. Esta aproximación permite generar hipótesis y establecer bases para futuros estudios con muestras más amplias, mayor duración del seguimiento y un análisis más profundo de los efectos funcionales y fisiológicos a medio y largo plazo.
Conclusiones
En nuestra experiencia clínica con 2 pacientes, el entrenamiento de la marcha asistida con exoesqueleto resulta ser una intervención segura y viable en pacientes con LM clínicamente estabilizada dentro de un entorno hospitalario, cuando se aplica bajo supervisión especializada y como parte de un programa de rehabilitación estructurado.
Este estudio piloto destaca el papel central del fisioterapeuta en la implementación clínica del exoesqueleto, siendo responsable de la preparación del paciente, el ajuste técnico del dispositivo y la progresión individualizada del tratamiento según la respuesta clínica. El uso de esta tecnología facilitó la organización de las sesiones de tratamiento más continuas y estructuradas, permitiendo la redistribución del esfuerzo tanto para el paciente como para el profesional.
Dado el carácter piloto del estudio, los resultados deben interpretarse con cautela. No obstante, la experiencia descrita pone de manifiesto la necesidad de futuros trabajos que permitan objetivar y desarrollar con mayor profundidad el papel del fisioterapeuta en el entrenamiento con exoesqueleto dentro de los programas de rehabilitación de la LM.
Tablas
Tabla 1. Características demográficas y clínicas basales de los participantes
Tabla 2. Criterios de inclusión y exclusión aplicados en la selección de participantes
Tabla 3. Evolución descriptiva de las variables de la marcha y fisiológicas durante el programa de entrenamiento con exoesqueleto
Figuras
Figura 1. Secuencia del protocolo de entrenamiento y registro de las variables durante una sesión de marcha asistida con exoesqueleto. Se muestra la transición desde la sedestación inicial a la bipedestación, el inicio y la finalización de la marcha asistida (30 minutos) y el retorno a la sedestación. En cada fase se registraron variables clínicas y fisiológicas, incluyendo la frecuencia cardiaca (FC) en diferentes momentos de la sesión, entre ellos tras los primeros 10 metros de marcha asistida (FC tras 10 m), escala de esfuerzo percibido de Borg modificada (Borgm) y escala visual analógica de dolor (EVA). Imagen cedida por ABLE Human Motion S.L., Barcelona, España.
Figura 2. Ajuste global del exoesqueleto en sedestación realizado por el fisioterapeuta, asegurando la correcta alineación articular y el posicionamiento adecuado de los segmentos del dispositivo antes del inicio del entrenamiento en bipedestación y marcha asistida.
Figura 3. Secuencia inicial del entrenamiento con exoesqueleto. A: preparación del paciente para el paso de sedestación a bipedestación con asistencia del fisioterapeuta, asegurando la estabilidad y la correcta activación del dispositivo; B: entrenamiento de la bipedestación estática, centrado en el control postural, el ajuste del centro de gravedad y la adaptación inicial a la carga en posición erguida.
Figura 4. Entrenamiento de la marcha asistida con exoesqueleto bajo supervisión del fisioterapeuta. A: marcha asistida con apoyo manual del fisioterapeuta, orientada al control postural, la alineación corporal y el guiado del patrón de marcha; B: visión frontal del paciente durante la marcha asistida con caminador, con el fisioterapeuta situado posteriormente para supervisar la seguridad, el control del movimiento y la progresión del entrenamiento.
Figura 5. Progresión del entrenamiento de la marcha asistida con exoesqueleto en un paciente con lesión medular incompleta. Se observa la marcha con menor nivel de asistencia del dispositivo, reflejando una mayor participación activa del paciente y un mejor control motor y postural, bajo supervisión del fisioterapeuta y con apoyo de ayudas técnicas.
Figura 6. Entrenamiento de un patrón de marcha en 4 puntos con muletas en un paciente con lesión medular incompleta en fase subaguda. Se observa la ejecución de la marcha asistida con exoesqueleto, con participación activa del paciente y supervisión constante del fisioterapeuta, tras alcanzar un adecuado control postural y manejo del dispositivo.
Información del artículo
Cita bibliográfica
Responsabilidades éticas
Protección de personas y animales. Los autores declaran que los procedimientos seguidos se conformaron a las normas éticas del comité de experimentación humana responsable y de acuerdo con la Asociación Médica Mundial y la Declaración de Helsinki.
Confidencialidad de los datos. Los autores declaran que han seguido los protocolos de su centro de trabajo sobre la publicación de datos de pacientes y que todos los pacientes incluidos en el estudio han recibido información suficiente y han dado su consentimiento informado por escrito para participar en dicho estudio.
Derecho a la privacidad y consentimiento informado. Los autores han obtenido el consentimiento informado de los pacientes y/o sujetos referidos en el artículo. Este documento obra en poder del autor de correspondencia.
Financiación. Los autores declaran que este trabajo no ha sido financiado.
Conflicto de interés. Los autores declaran no tener ningún conflicto de intereses.
Agradecimientos
Los autores agradecen la colaboración del Servicio de Rehabilitación del Hospital Asepeyo Sant Cugat y la implicación del equipo clínico en el desarrollo del programa de entrenamiento.
Descargar artículo:
Licencia:
Este contenido es de acceso abierto (Open-Access) y se ha distribuido bajo los términos de la licencia Creative Commons CC BY-NC-ND (Reconocimiento-NoComercial-SinObraDerivada 4.0 Internacional) que permite usar, distribuir y reproducir en cualquier medio siempre que se citen a los autores y no se utilice para fines comerciales ni para hacer obras derivadas.
Comparte este contenido
En esta edición
- ¡¡Seguimos!!
- Tratamiento y prevención de neuromas en continuidad y neurodesis en la mano y la muñeca con colgajos fasciograsos
- Retorno al trabajo tras la reconstrucción artroscópica con aloinjerto de los ligamentos talofibular anterior y calcaneofibular en la inestabilidad crónica de tobillo
- Accidente cerebrovascular isquémico en el contexto laboral: diferencias entre la valoración clínica y la prestacional
- Desarrollo de una herramienta de búsqueda en PubMed mediante términos MeSH para sanitarios en el ámbito de una Mutua Colaboradora con la Seguridad Social
- Rol del fisioterapeuta en el entrenamiento con exoesqueleto en pacientes con lesión medular: experiencia piloto hospitalaria
- Análisis epidemiológico de mordeduras atendidas en una mutua de accidentes de trabajo
- Corazón de mimbre, cuerpo de titanio: deformación plástica de 90° sin rotura en una placa volar bloqueada de radio distal
- Osteosíntesis esternal mínimamente invasiva: fijación con placa y tornillos autoperforantes
Más en PUBMED
Más en Google Scholar
Más en ORCID

Revista Española de Traumatología Laboral está distribuida bajo una licencia de Creative Commons Reconocimiento-NoComercial-SinObraDerivada 4.0 Internacional.