
Biomecánica de la primera articulación tarsometatarsiana
Biomechanics of the first tarsalmetatarsal joint
Recuerdo anatómico
En este apartado no vamos a describir de forma exhaustiva la anatomía de la primera articulación tarsometatarsiana (1.ª ATMT), la cual ya ha sido descrita en el capítulo correspondiente de este monográfico. Solo comentaremos brevemente aquellos aspectos que tienen especial relevancia para la comprensión de la biomecánica de esta región.
La carilla articular anterior del cuneiforme medial (C1) (Figura 1A) tiene una forma de croissant de concavidad externa con los extremos redondeados, siendo la parte superior más afilada y la inferior más ancha. Los extremos superior e inferior del croissant están ligeramente inclinados hacia delante, ejerciendo de topes óseos para frenar el movimiento de deslizamiento en sentido vertical. En el plano transversal, la superficie articular es convexa hacia delante.
rpt.3502.fs2106022-figura1.png
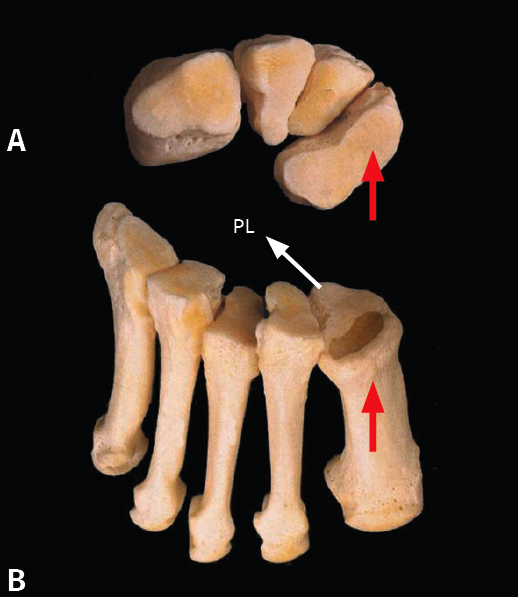
Figura 1. A: carilla articular distal del primer cuneiforme; B: carilla articular proximal del primer metatarsiano. La flecha roja muestra fuerzas de compresión. La flecha blanca, fuerzas de tracción del peroneo largo (PL).
La superficie articular de la base del primer metatarsiano (M1) (Figura 1B) es congruente con C1. Tiene una forma triangular de vértice inferior: la parte superior, más ancha, es perpendicular al eje del primer metatarsiano y está preparada para soportar fuerzas de compresión. El vértice inferior, en forma de quilla, recibe la inserción del peroneo lateral largo y está preparado para soportar fuerzas de tracción(1).
La articulación se encuentra estabilizada por una serie de formaciones ligamentosas(2):
- En la parte dorsomedial existe un potente ligamento que discurre entre el primer cuneiforme y el primer metatarsiano. Controla la flexión plantar de M1.
- En la parte plantar existe un ligamento rectangular que une el cuneiforme con el metatarsiano y que es una prolongación del ligamento naviculocuneiforme. Este ligamento controla la flexión dorsal de M1 y es más potente que el anterior.
Un segundo ligamento se origina en la parte inferolateral de C1 y se dirige transversalmente al segundo y tercer metatarsianos (M2 y M3): se trata de un ligamento muy potente que es básico para el mantenimiento del arco tarsometatarsiano. - El ligamento interóseo de Lisfranc se dirige desde la cara lateral de C1, por debajo de la carilla articular de M1-M2, hasta la mitad inferior de la cara medial de la base de M2. Se encuentra, pues, situado por encima del tendón del peroneo largo. Se trata de un ligamento muy potente cuya misión es mantener unidas las columnas medial y central de la articulación de Lisfranc.
Cinemática
La 1.ª ATMT se asemeja a una articulación condílea con un doble movimiento en los planos sagital y transversal. Se mueve juntamente con la articulación naviculocuneiforme, o articulación innominada, alrededor de un eje común de movimiento. Este eje forma un ángulo de 45° con el plano frontal y sagital, y un ángulo ligeramente oblicuo de 5° en el plano transverso (Figura 2).
rpt.3502.fs2106022-figura2.png
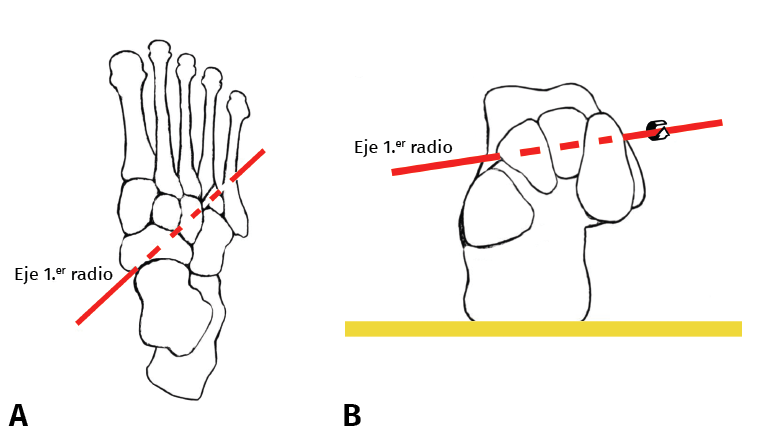
Figura 2. Eje de la primera articulación tarsometatarsiana: 45° en planos sagital y frontal, 5° en plano transverso. Movimientos: dorsiflexión + supinación. Flexión plantar + pronación.
Se trata pues de un movimiento triplanar que en el plano transverso es insignificante, existiendo a este nivel una mínima abducción-aducción. Cuando el primer radio se mueve en dorsiflexión realiza además un movimiento de inversión, cuando se mueve en flexión plantar realiza una eversión. El grado de movimiento de flexión plantar-dorsal es aproximadamente igual al de eversión-inversión(3).
Otro aspecto que ha sido objeto de debate en la literatura es el de la forma y la orientación de la 1.ª ATMT: son muy difíciles de valorar porque se ha visto que varían en función del ángulo de incidencia de la proyección radiológica al tomar la radiografía dorsoplantar. Nuestro grupo(4) hace años realizó un estudio radiológico de forma uniforme sobre 80 pies: todas las radiografías se tomaron en bipedestación y con el mismo ángulo de incidencia del rayo. Los resultados que obtuvimos están representados en la Figura 3A. Se ha postulado (Figura 3B) que la forma curvilínea favorece la aducción y el metatarso varo en el hallux valgus pero, a su vez, favorece la corrección de la deformidad. La forma rectilínea comportaría una articulación más rígida en el plano horizontal(5). De todas maneras otros autores no encuentran relación directa entre la forma de la articulación y la severidad del hallux valgus(6).
rpt.3502.fs2106022-figura3.png
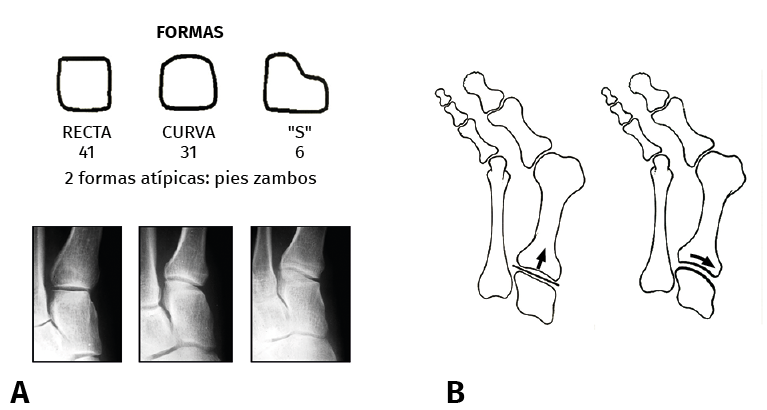
Figura 3. A: Distintas formas de primera articulación tarsometatarsiana; B: la forma curva favorece la aducción.
De Doncker y Kowalski(7) dividen, desde un punto de vista funcional, la articulación de Lisfranc en 3 partes (Figura 4A):
- Una columna central formada por los cuneiformes C2 y C3 con M2 y M3, que son las articulaciones más rígidas. Recordemos que M2 se extiende más proximalmente en el plano horizontal, quedando encajado entre los 3 cuneiformes. En el plano frontal, la articulación de Lisfranc tiene la forma de un arco romano, siendo la 2.ª ATMT la piedra angular que le confiere una gran estabilidad-rigidez. La movilidad de la 2.ª ATMT en el plano sagital (flexoextensión) es mínima, solo de 0,6°, y el de la 3.ª ATMT es de 1,6°(8).
- La columna medial está formada por M1 y C1, y es más móvil que la anterior, alcanzando 3,5°.
- La columna lateral está formada por el pie calcáneo: el cuboides y M4, M5. Es la paleta más móvil de todas: la 4.ª ATMT tiene una movilidad de 9,6° y la 5.ª ATMT de 10,2°.
Con el pie en descarga, las columnas medial y lateral se encuentran en flexión plantar, formándose un arco transverso a nivel del apoyo de las cabezas metatarsianas (Figura 4B). Con el pie en carga estática, las columnas medial y lateral se elevan con un movimiento de flexión dorsal y todas las cabezas apoyan de forma uniforme en el suelo (Figura 4C). Es decir, con el pie en carga, no existe el arco transverso a nivel del antepié y todas las cabezas metatarsianas soportan el peso del cuerpo(5). La estabilización del antepié en el plano horizontal corre a cargo del ligamento intermetatarsiano transverso y del fascículo transverso del músculo abductor del hallux. Ambas estructuras evitan el pie plano transverso del antepié manteniendo los metatarsianos unidos (Figura 4D).
rpt.3502.fs2106022-figura4.png
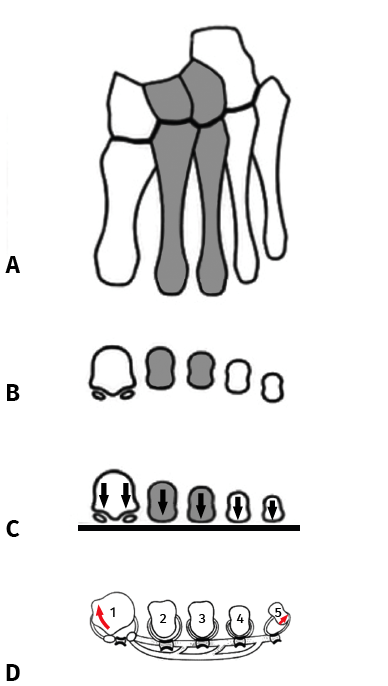
Figura 4. A: Paletas medial, central y lateral; B: arco transverso en descarga; C: en carga todas las cabezas metatarsianas soportan peso; D: estabilización del pie en el plano frontal.
En dinámica, durante la primera parte del periodo de apoyo de la marcha (2.º rocker), la articulación subtalar realiza un movimiento de pronación que comporta una rotación interna del pie alrededor de su eje longitudinal (Figura 5A). Ello implica que el primer radio del pie sufra la fuerza de reacción del suelo y el antepié realice un movimiento de supinación. Gracias a este doble movimiento helicoidal en sentido inverso de retropié-antepié, a mitad del periodo de apoyo la articulación subtalar se encuentra en posición neutra y las articulaciones mediotarsianas en pronación, bloqueadas contra el retropié. En esta situación, la superficie de apoyo del antepié es paralela a la superficie de apoyo del retropié y el pie presenta un apoyo plantígrado en el suelo (Figura 5B).
En la segunda parte del periodo de apoyo, cuando el pie se prepara para la fase de despegue, la contracción del tríceps sural provoca un movimiento de supinación de la articulación subtalar colocando el retropié en varo (Figura 5C). En esta posición, el retropié queda bloqueado y estable para soportar el peso del cuerpo en esta fase propulsiva de la marcha. A nivel del antepié se realiza un movimiento contrario de pronación, de tal forma que la carga se va desplazando desde los radios externos hacia el primer radio, el cual es la última parte del pie que contacta con el suelo durante la propulsión (Figura 5D).
rpt.3502.fs2106022-figura5.png
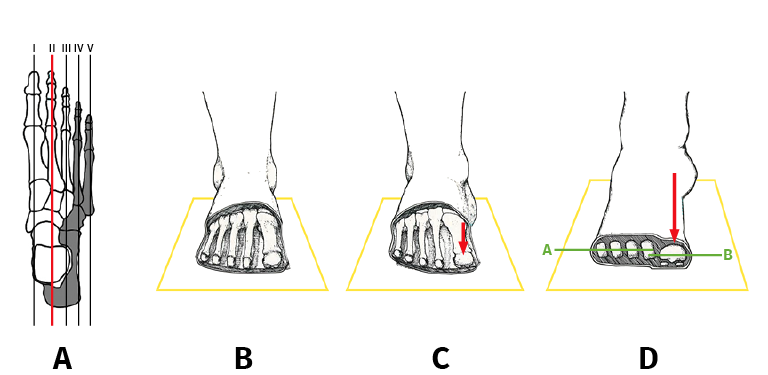
Figura 5. A: M2: fijo = eje de pronosupinación del pie; B: apoyo plantígrado; C: inicio del despegue: varización del talón y pronación del primer radio; D: despegue del antepié de lateral a medial. Se incrementa la carga sobre el primero.
Como podemos ver, para un correcto funcionamiento mecánico del pie es absolutamente necesario que las articulaciones mediotarsianas y TMT sean flexibles, de tal forma que los movimientos de pronosupinación del retropié son compensados por los movimientos inversos a nivel del antepié.
Por otra parte, la flexibilidad de estas articulaciones permite compensar deformidades del pie en el plano frontal: un pie plano con pronación a nivel de la subtalar es compensado por una supinación a nivel del antepié. Una excesiva verticalización del primer radio es compensada por una supinación del retropié.
Cuando existe un primer metatarsiano excesivamente corto (index minus), la compensación del antepié se realiza aumentando la flexión plantar del primer metatarsiano, a nivel de la primera TMT, para que pueda contactar con el suelo. En estos casos, se puede apreciar una prominencia en el dorso de la articulación relacionada con una hipertrofia a este nivel que intenta mantener el primer metatarsiano en flexión plantar.
En aquellos pies en los que durante la fase propulsiva de la marcha no se produce la inversión y el bloqueo del retropié, existe una excesiva pronación que conduce a la hipermovilidad y la inestabilidad del primer radio en flexión dorsal e inversión, provocada por la fuerza de reacción del suelo. A ello contribuye el hecho de que el valgo del calcáneo provoca una disminución de la fuerza flexora del peroneo largo sobre M1, como se comentará más adelante. El hecho de que el primer radio inestable no apoye firmemente en el suelo durante la fase propulsiva de la marcha provocará una metatarsalgia por transferencia de la carga a los radios laterales.
Otra consecuencia de la hipermovilidad del primer radio es la aparición de un hallux limitus: en este, la base de la falange proximal no es capaz de moverse hacia el dorso de la cabeza de M1 y se encuentra subluxada plantarmente. En estos casos, en la fase propulsiva de la marcha, la metatarsofalángica no se mueve en flexión dorsal y se produce una compresión en el dorso de la articulación que a la larga conduce al hallux rigidus. Lo mismo ocurre en aquellos casos con un M1 muy largo (index plus) o un metatarsus primus elevatus, sea congénito o secundario a una supinación rígida del antepié, en el contexto de un pie plano estructurado.
Cinética
Siguiendo las ideas de Morton(9), en situación estática las fuerzas que recibe el antepié se dividen en 6 partes: una parte para cada uno de los radios laterales y dos para el primer radio. Por tanto, la carga soportada por la 1.ª ATMT corresponde a 2/6 del peso corporal (Figura 4C).
En dinámica, durante el 2.º rocker, la articulación de Lisfranc está sometida a fuerzas dorsiflexoras que tienden a colapsar la bóveda plantar. Los mecanismos anticolapso son fundamentalmente 3:
- El encaje de M2 entre los 3 cuneiformes que ya hemos comentado. Constituye una estabilización ósea primaria.
- Los ligamentos plantares, fundamentalmente de la 1.ª ATMT y el ligamento interóseo de Lisfranc.
- La fascia plantar, que actúa como una cuerda de arco que mantiene la bóveda. Al ser la estructura más alejada del punto de colapso, dispone de un mayor brazo de palanca para resistirlo.
rpt.3502.fs2106022-figura6.png
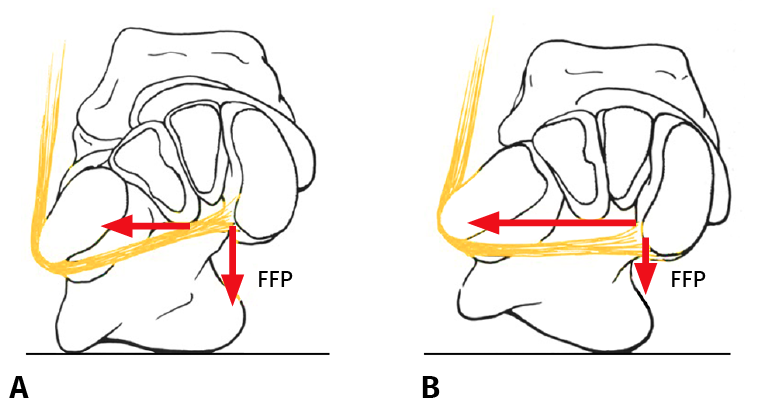
Figura 6. A: con el talón en posición neutra, el peroneo largo sigue un trayecto ascendente y la fuerza flexora plantar (FFP) es fisiológica; B: con el talón en valgo, disminuye la fuerza flexora.
Durante la fase propulsiva de la marcha (3.er rocker), la articulación de Lisfranc trabaja fundamentalmente soportando fuerzas de compresión. Esto ocurre especialmente a nivel de la 1.ª ATMT, la cual recibe las fuerzas axiales provenientes de M1 y las transmite, a través del pie astragalino, al tobillo. Como hemos comentado en el recuerdo anatómico (Figura 1), la base del metatarsiano es más ancha en la parte dorsal y perpendicular al eje de M1, lo que le permite soportar las importantes fuerzas compresivas provenientes del suelo. En la parte inferior de la articulación se inserta el peroneo largo que, como hemos dicho, trabajando a tracción, flexiona y estabiliza el primer metatarsiano contra el suelo en la transición entre el 2.º y el 3.º rocker. Para que el peroneo largo pueda ejercer bien su función, es necesario que su trayecto transversal, desde el borde externo debajo del cuboides al borde interno del pie, siga una dirección ascendente de lateral a medial (Figura 6A). Cuando existe una pronación del retropié y el trayecto es paralelo al suelo, disminuye el componente flexor plantar de la fuerza (Figura 6B). Por el contrario, si el trayecto es más ascendente debido a un varo del retropié, aumenta el componente flexor de la fuerza y, por tanto, la verticalización de M1 y el cavo.
rpt.3502.fs2106022-figura7.png
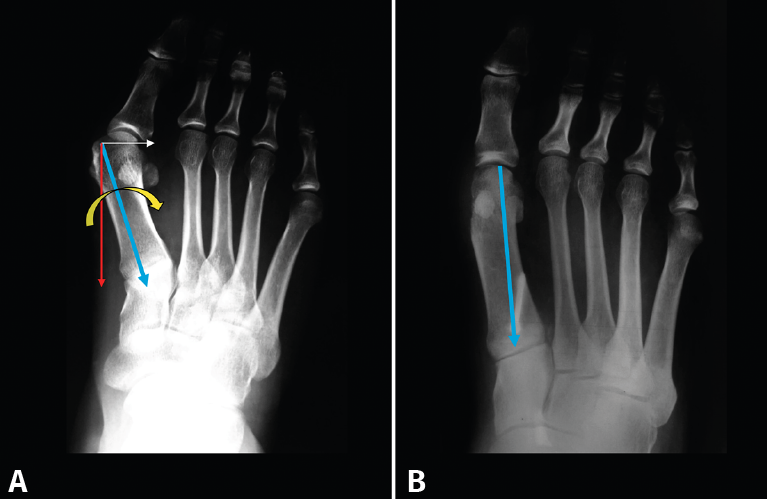
Figura 7. A: Cuando M1 se desvía en varo, la fuerza de reacción del suelo provoca en la primera tarsometatarsiana una dorsiflexión y una rotación externa; B: la osteotomía lateralizadora contribuye a estabilizar la articulación.
Como vemos, la 1.ª ATMT está muy bien preparada para soportar las fuerzas de compresión y tensión. En cambio, su morfología no está preparada para soportar fuerzas de rotación en el plano frontal. Cuando M1 está desviado en aducción-varo (Figura 7A), la fuerza de reacción del suelo que recibe provocará a nivel de la 1.ª ATMT una dorsiflexión en el plano sagital y una rotación externa en el plano frontal. Ambos movimientos se ven aumentados a medida que aumenta la aducción del metatarsiano. En estudios sobre cadáver(10), se ha comprobado que, en el hallux valgus, al realizar una osteotomía lateralizadora de M1, la primera TMT se estabiliza, oponiéndose mejor a las fuerzas dorsiflexoras (Figura 7B).
Figuras
Figura 1. A: carilla articular distal del primer cuneiforme; B: carilla articular proximal del primer metatarsiano. La flecha roja muestra fuerzas de compresión. La flecha blanca, fuerzas de tracción del peroneo largo (PL).
Figura 2. Eje de la primera articulación tarsometatarsiana: 45° en planos sagital y frontal, 5° en plano transverso. Movimientos: dorsiflexión + supinación. Flexión plantar + pronación.
Figura 3. A: Distintas formas de primera articulación tarsometatarsiana; B: la forma curva favorece la aducción.
Figura 4. A: Paletas medial, central y lateral; B: arco transverso en descarga; C: en carga todas las cabezas metatarsianas soportan peso; D: estabilización del pie en el plano frontal.
Figura 5. A: M2: fijo = eje de pronosupinación del pie; B: apoyo plantígrado; C: inicio del despegue: varización del talón y pronación del primer radio; D: despegue del antepié de lateral a medial. Se incrementa la carga sobre el primero.
Figura 6. A: con el talón en posición neutra, el peroneo largo sigue un trayecto ascendente y la fuerza flexora plantar (FFP) es fisiológica; B: con el talón en valgo, disminuye la fuerza flexora.
Figura 7. A: Cuando M1 se desvía en varo, la fuerza de reacción del suelo provoca en la primera tarsometatarsiana una dorsiflexión y una rotación externa; B: la osteotomía lateralizadora contribuye a estabilizar la articulación.
Información del artículo
Cita bibliográfica
Responsabilidades éticas
Protección de personas y animales. Los autores declaran que para esta investigación no se han realizado experimentos en seres humanos ni en animales.
Confidencialidad de los datos. Los autores declaran que han seguido los protocolos de su centro de trabajo sobre la publicación de datos de pacientes.
Derecho a la privacidad y consentimiento informado. Los autores declaran que en este artículo no aparecen datos de pacientes.
Financiación. Los autores declaran que este trabajo no ha sido financiado.
Conflicto de intereses. Los autores declaran no tener ningún conflicto de intereses.
Descargar artículo:
Licencia:
Este contenido es de acceso abierto (Open-Access) y se ha distribuido bajo los términos de la licencia Creative Commons CC BY-NC-ND (Reconocimiento-NoComercial-SinObraDerivada 4.0 Internacional) que permite usar, distribuir y reproducir en cualquier medio siempre que se citen a los autores y no se utilice para fines comerciales ni para hacer obras derivadas.
Comparte este contenido
En esta edición
- Hacia una nueva normalidad
- A veces sucede al revés, el bosque no nos deja ver el árbol
- Evolución de la primera articulación tarsometatarsiana. Un viaje de ida y vuelta
- Anatomía de la primera articulación tarsometatarsiana
- Biomecánica de la primera articulación tarsometatarsiana
- Afectación de la primera articulación tarsometatarsiana en las malformaciones del neonato: pie equinovaro, metatarso aducto, pie en serpentín
- ¿Existe una relación entre la primera articulación tarsometatarsiana y el <em>hallux valgus</em>?
- La primera articulación tarsometatarsiana en el pie plano y el pie cavo
- Artrosis de la primera articulación tarsometatarsiana primaria y postraumática secundaria a fractura-luxación de Lisfranc
- Osteotomías distales metatarsales mínimamente invasivas guiadas por ecografía (US-DMMO): estudio de concordancia ecográfica inter- e intraobservador
- Lesiones óseas en pacientes erróneamente diagnosticados de esguince de tobillo. Serie de casos y factores a tener en cuenta
- Técnica de extracción de un clavo de artrodesis tibiotalocalcánea roto. Serie de casos
- Síndrome del túnel del tarso posterior. Tratamiento y revisión. A propósito de un caso
- Revista de revistas
Más en PUBMED
Más en Google Scholar

Revista del pie y tobillo está distribuida bajo una licencia de Creative Commons Reconocimiento-NoComercial-SinObraDerivada 4.0 Internacional.